Product
MATEK Mateksys RC HELICOPTER FLYBARLESS FBL ROTORFLIGHT G474-HLITE
Options (1)

Quantity
Share
SPECIFICATIONS
Brand Name: MATEKSYS
Certification: CE
For Vehicle Type: Airplanes
Is Electric: No Battery
Material: Composite Material
Model Number: G474-HLITE
Origin: Mainland China
Quantity: 1 pcs
Recommend Age: 14+y
Use: Vehicles & Remote Control Toys
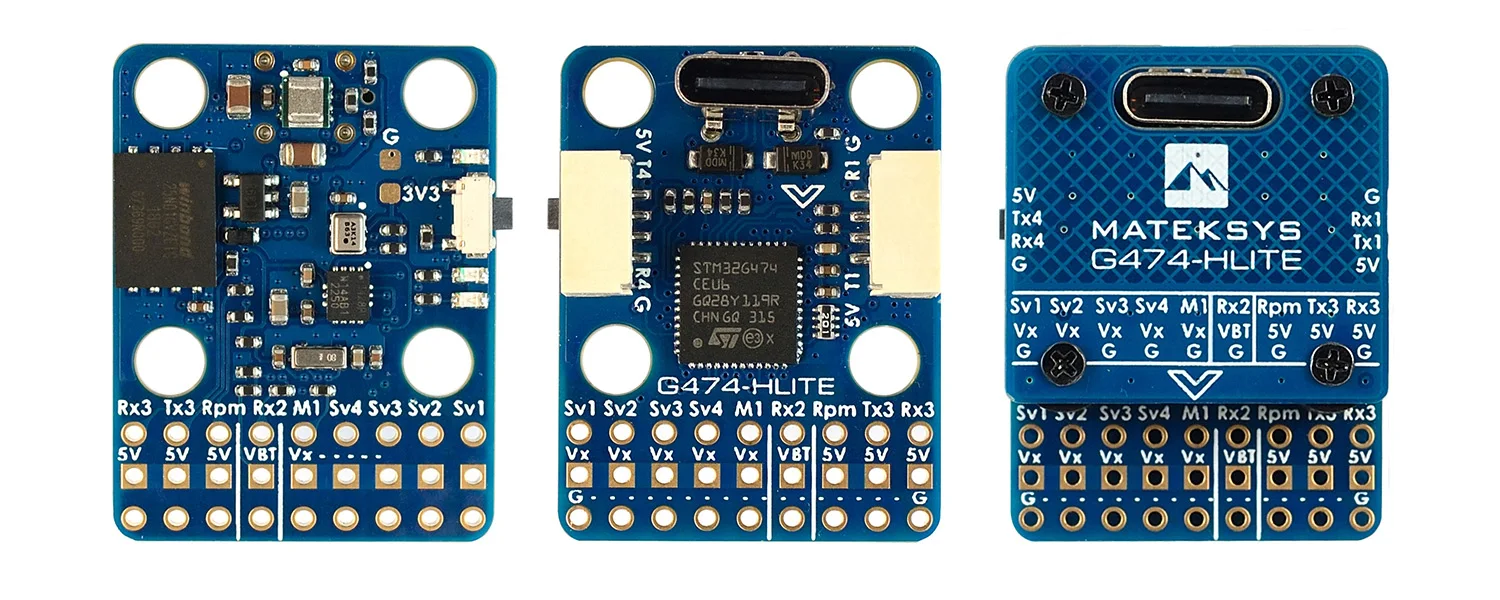
RC HELICOPTER FLYBARLESS CONTROLLER G474-HLITE
STM32G474, ICM42688P, SPL06L, 5V BEC, 3.5xUarts, Rotorflight firmware



Specifications
MCU: STM32G474CE, 170MHz Cortex-M4 , 512KB Flash
IMU: ICM42688-P
Baro: SPL06
Blackbox: 128MB Flash (1G-bit NAND)
3.5x UARTs (full UART1/UART3/UART4, and UART2_Rx)
6x PWM (4x Servos, 1x Motors, RPM)
1x ADC (VBAT sense)
No I2C pad breakout
USB Type-C(USB2.0)
Electrical characteristics
Input voltage range: 4.5V~14V on “Vx” pad
BEC 5V 1.5A output for FC components and peripherals
Battery Voltage divider 1K:10K (Scale 110)
Static power: 60mA@5V
No current sensor integrated.
Physical
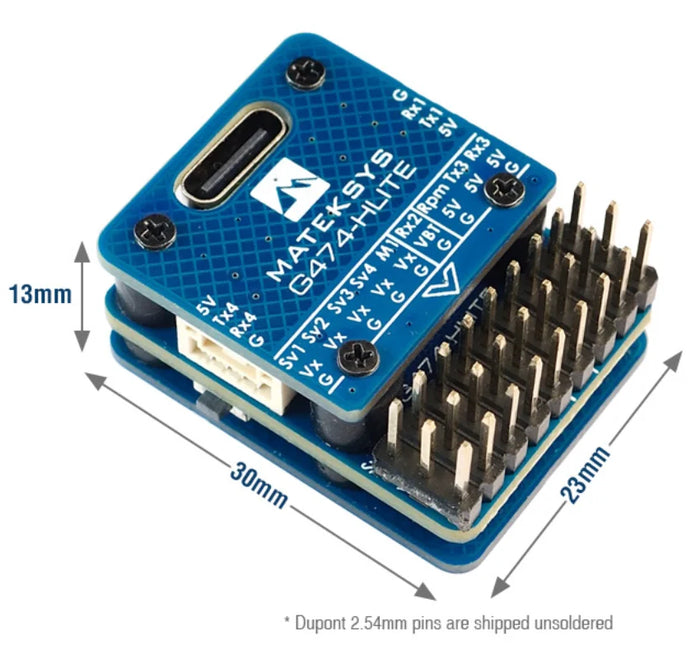
Dimensions: 30 x 23 x H13 mm
Mounting: 16 x 16mm, Φ4mm with Grommets Φ3mm
Weight: 9g (w/o pins)
Including
1x G474-HLITE
2x 20cm JST-GH-4P to JST-GH-4P cable
Dupont 2.54 pins (Board is shipped unsoldered)
Flahing firmware /config
Rotorflight / MATEKG474HELI
Rotorflight configurator 2.x https://github.com/rotorflight/rotorflight-configurator/releases
Rotorflight Wiki https://github.com/rotorflight/rotorflight/wiki
[Firmware preloaded in factory] rotorflight_4.3.0_rc2.
[Flashing with latest RF2 fw] Select “MATEKG474HELI” target in Rotorflight configurator –> Load firmware (online) –> Flash firmware.
[Flashing with latest RF2 fw] Select “STM32G47X” target in Rotorflight configurator –> Load firmware (online) –> Flash firmware. After flashing and G474-HELI rebooting, connect G474-HELI to RF configurator, go into CLI mode, copy and paste all config lines into CLI, type “save”, press ENTER.
Tips
There are silicon grommets for vibration damping. Additional damping is not must.
No UART2_Tx(Tx2) breakout on this board.
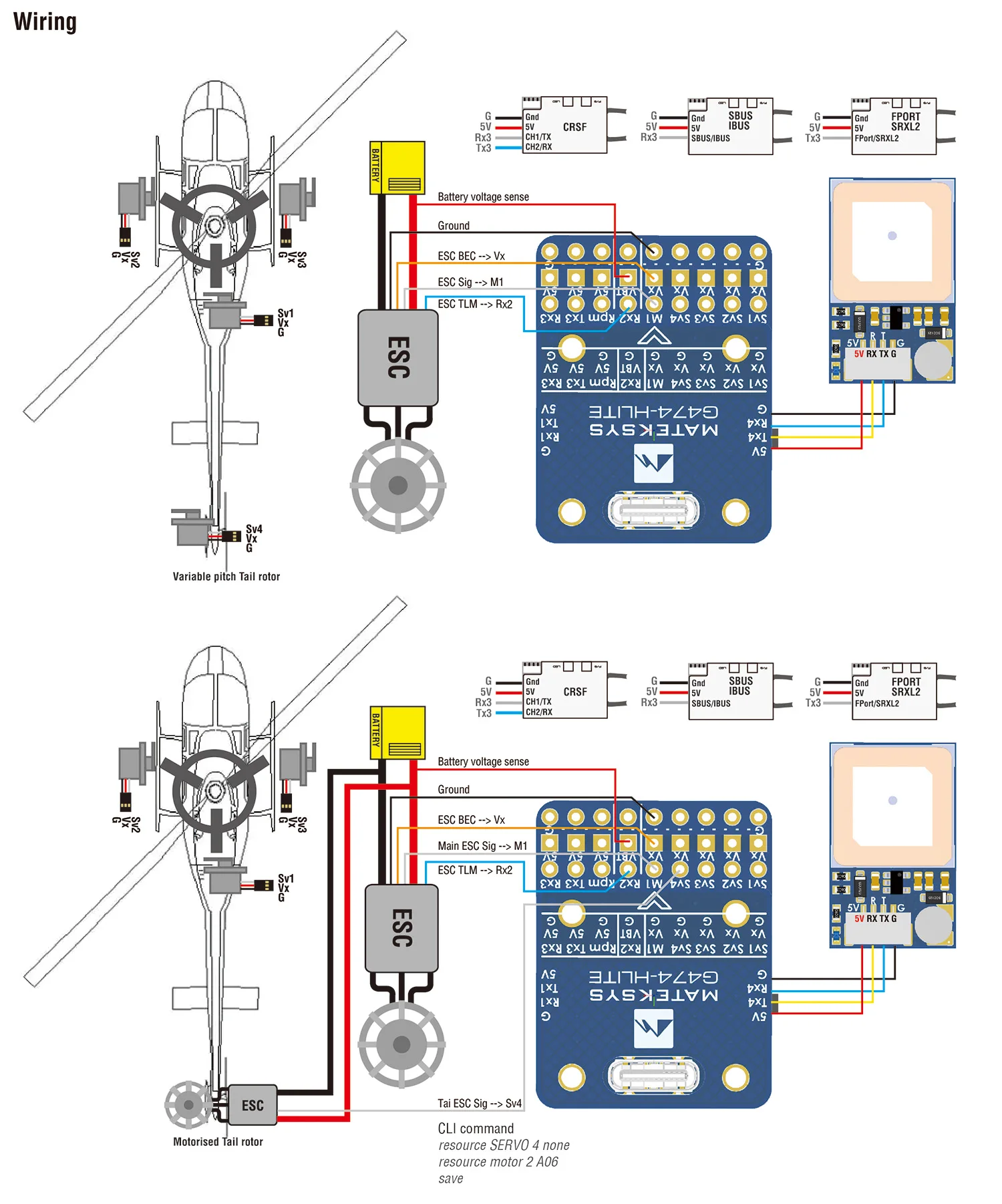
No “M2” breakout pad on this board, If use it for helicopter with motorised tail rotor, You can remap sv4(servo 4) to M2(motor 2) by CLI command ” resource SERVO 4 none, resource motor 2 A06 “
No “Curr” breakout pad for external current sensor, You can use “Rx2” as current ADC pin. CLI command ” resource SERIAL_RX 2 none, resource ADC_CURR 1 A03 ” or use “RPM” pin, CLI command ” resource FREQ 1 none, resource ADC_CURR 1 B02 ”
Due to leakage voltage on MCU I/O, there is floating current readout when no external current sensor connected. You can ” set current_meter = NONE “, or just ignore it.
If the FC is mounted with arrow facing backward. set gyro_1_sensor_align = CW0FLIP
Blheli bi-direction Dshot ESC, enabled RPM filter: feature rpm_filter

No reviews yet. Be the first to leave a review.